|
 |
 |
| Home | Free Glossaries | Free Dictionaries | Post Your Translation Job! | Free Articles | Jobs for Translators |
|
||||||||
|
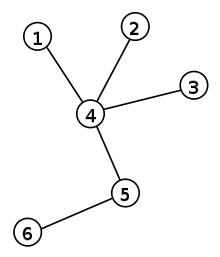
Graph Theory Glossaryhttp://en.wikipedia.org/wiki/Glossary_of_graph_theory Become a member of TranslationDirectory.com at just $12 per month (paid per year) Advertisements: Use the search bar to look for terms in all glossaries, dictionaries, articles and other resources simultaneously Graph theory is a growing area in mathematical research, and has a large specialized vocabulary. Some authors use the same word with different meanings. Some authors use different words to mean the same thing. This page attempts to keep up with current usage. BasicsA graph G consists of two types of elements, namely vertices and edges. Every edge has two endpoints in the set of vertices, and is said to connect or join the two endpoints. An edge can thus be defined as a set of two vertices (or an ordered pair, in the case of a directed graph - see Section Direction). Alternative models of graphs exist; e.g., a graph may be thought of as a Boolean binary function over the set of vertices or as a square (0,1)-matrix. A vertex is simply drawn as a node or a dot. The vertex set of G is usually denoted by V(G), or V when there is no danger of confusion. The order of a graph is the number of its vertices, i.e. |V(G)|. An edge (a set of two elements) is drawn as a line connecting two vertices, called endpoint or (less often) endvertices. An edge with endvertices x and y is denoted by xy (without any symbol in between). The edge set of G is usually denoted by E(G), or E when there is no danger of confusion. The size of a graph is the number of its edges, i.e. |E(G)|. A loop is an edge whose endpoints are the same vertex. A link has two distinct endvertices. An edge is multiple if there is another edge with the same endvertices; otherwise it is simple. The multiplicity of an edge is the number of multiple edges sharing the same endvertices; the multiplicity of a graph, the maximum multiplicity of its edges. A graph is a simple graph if it has no multiple edges or loops, a multigraph if it has multiple edges, but no loops, and a multigraph or pseudograph if it contains both multiple edges and loops (the literature is highly inconsistent). When stated without any qualification, a graph is almost always assumed to be simple—one has to judge from the context. Graphs whose edges or vertices have names or labels are known as labeled, those without as unlabeled. Graphs with labeled vertices only are vertex-labeled, those with labeled edges only are edge-labeled. The difference between a labeled and an unlabeled graph is that the latter has no specific set of vertices or edges; it is regarded as another way to look upon an isomorphism type of graphs. (Thus, this usage distinguishes between graphs with identifiable vertex or edge sets on the one hand, and isomorphism types or classes of graphs on the other.) (Graph labeling usually refers to the assignment of labels (usually natural numbers, usually distinct) to the edges and vertices of a graph, subject to certain rules depending on the situation. This should not be confused with a graph's merely having distinct labels or names on the vertices.) 
A labeled simple graph with vertex set V = {1, 2, 3, 4, 5,
6} and edge set E = {{1,2}, {1,5}, {2,3}, {2,5}, {3,4}, {4,5},
{4,6}}.
A hyperedge is an edge that is allowed to take on any number of vertices, possibly more than 2. A graph that allows any hyperedge is called a hypergraph. A simple graph can be considered a special case of the hypergraph, namely the 2-uniform hypergraph. However, when stated without any qualification, an edge is always assumed to consist of at most 2 vertices, and a graph is never confused with a hypergraph. A non-edge (or anti-edge) is an edge that is not present in the graph. More formally, for two vertices u and v, {u,v} is a non-edge in a graph G whenever {u,v} is not an edge in G. This means that there is either no edge between the two vertices or (for directed graphs) at most one of (u,v) and (v,u) from v is an arc in G. Occasionally the term cotriangle or anti-triangle is used for a set of three vertices none of which are connected. The complement An edgeless graph or empty graph or null graph is a graph with zero or more vertices, but no edges. The empty graph or null graph may also be the graph with no vertices and no edges. If it is a graph with no edges and any number n of vertices, it may be called the null graph on n vertices. (There is no consistency at all in the literature.) A graph is infinite if it has infinitely many vertices or edges or both; otherwise the graph is finite. An infinite graph where every vertex has finite degree is called locally finite. When stated without any qualification, a graph is usually assumed to be finite. See also continuous graph. Two graphs G and H are said to be isomorphic, denoted by G ~ H, if there is a one-to-one correspondence, called an isomorphism, between the vertices of the graph such that two vertices are adjacent in G if and only if their corresponding vertices are adjacent in H. Likewise, a graph G is said to be homomorphic to a graph H if there is a mapping, called a homomorphism, from V(G) to V(H) such that if two vertices are adjacent in G then their corresponding vertices are adjacent in H. SubgraphsA subgraph of a graph G is a graph whose vertex set is a subset of that of G, and whose adjacency relation is a subset of that of G restricted to this subset. In the other direction, a supergraph of a graph G is a graph of which G is a subgraph. We say a graph G contains another graph H if some subgraph of G is H or is isomorphic to H. A subgraph H is a spanning subgraph, or factor, of a graph G if it has the same vertex set as G. We say H spans G. A subgraph H of a graph G is said to be induced if, for any pair of vertices x and y of H, xy is an edge of H if and only if xy is an edge of G. In other words, H is an induced subgraph of G if it has exactly the edges that appear in G over the same vertex set. If the vertex set of H is the subset S of V(G), then H can be written as G[S] and is said to be induced by S. A graph that does not contain H as an induced subgraph is said to be H-free. A universal graph in a class K of graphs is a simple graph in which every element in K can be embedded as a subgraph. A graph G is minimal with some property P provided that G has property P and no proper subgraph of G has property P. In this definition, the term subgraph is usually understood to mean "induced subgraph." The notion of maximality is defined dually: G is maximal with P provided that P(G) and G has no supergraph H such that P(H). WalksA walk is an alternating sequence of vertices and edges, beginning and ending with a vertex, where each vertex is incident to both the edge that precedes it and the edge that follows it in the sequence, and where the vertices that precede and follow an edge are the end vertices of that edge. A walk is closed if its first and last vertices are the same, and open if they are different. The length l of a walk is the number of edges that it uses. For an open walk, l = n–1, where n is the number of vertices visited (a vertex is counted each time it is visited). For a closed walk, l = n (the start/end vertex is listed twice, but is not counted twice). In the example graph, (1, 2, 5, 1, 2, 3) is an open walk with length 5, and (4, 5, 2, 1, 5, 4) is a closed walk of length 5. A trail is a walk in which all the edges are distinct. A closed trail has been called a tour or circuit, but these are not universal, and the latter is often reserved for a regular subgraph of degree two. 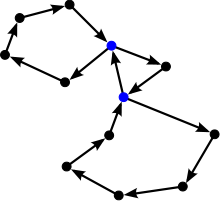
A directed cycle. Without the arrows, it is just a cycle.
This is not a simple cycle, since the blue vertices are used twice. Traditionally, a path referred to what is now usually known as an open walk. Nowadays, when stated without any qualification, a path is usually understood to be simple, meaning that no vertices (and thus no edges) are repeated. (The term chain has also been used to refer to a walk in which all vertices and edges are distinct.) In the example graph, (5, 2, 1) is a path of length 2. The closed equivalent to this type of walk, a walk that starts and ends at the same vertex but otherwise has no repeated vertices or edges, is called a cycle. Like path, this term traditionally referred to any closed walk, but now is usually understood to be simple by definition. In the example graph, (1, 5, 2, 1) is a cycle of length 3. (A cycle, unlike a path, is not allowed to have length 0.) Paths and cycles of n vertices are often denoted by Pn and Cn, respectively. (Some authors use the length instead of the number of vertices, however.) C1 is a loop, C2 is a digon (a pair of parallel undirected edges in a multigraph, or a pair of antiparallel edges in a directed graph), and C3 is called a triangle. A cycle that has odd length is an odd cycle; otherwise it is an even cycle. One theorem is that a graph is bipartite if and only if it contains no odd cycles. (See complete bipartite graph.) A graph is acyclic if it contains no cycles; unicyclic if it contains exactly one cycle; and pancyclic if it contains cycles of every possible length (from 3 to the order of the graph). The girth of a graph is the length of a shortest (simple) cycle in the graph; and the circumference, the length of a longest (simple) cycle. The girth and circumference of an acyclic graph are defined to be infinity ∞. A path or cycle is Hamiltonian (or spanning) if it uses all vertices exactly once. A graph that contains a Hamiltonian path is traceable; and one that contains a Hamiltonian path for any given pair of (distinct) end vertices is a Hamiltonian connected graph. A graph that contains a Hamiltonian cycle is a Hamiltonian graph. A trail or circuit (or cycle) is Eulerian if it uses all edges precisely once. A graph that contains an Eulerian trail is traversable. A graph that contains an Eulerian circuit is an Eulerian graph. Two paths are internally disjoint (some people call it independent) if they do not have any vertex in common, except the first and last ones. A theta graph is the union of three internally disjoint (simple) paths that have the same two distinct end vertices. A theta0 graph has seven vertices which can be arranged as the vertices of a regular hexagon plus an additional vertex in the center. The eight edges are the perimeter of the hexagon plus one diameter. Trees
A tree is a connected acyclic simple graph. A vertex of degree 1 is called a leaf, or pendant vertex. An edge incident to a leaf is a leaf edge, or pendant edge. (Some people define a leaf edge as a leaf and then define a leaf vertex on top of it. These two sets of definitions are often used interchangeably.) A non-leaf vertex is an internal vertex. Sometimes, one vertex of the tree is distinguished, and called the root; in this case, the tree is called rooted. Rooted trees are often treated as directed acyclic graphs with the edges pointing away from the root. A subtree of the tree T is a connected subgraph of T. A forest is an acyclic simple graph. A subforest of the forest F is a subgraph of F. A spanning tree is a spanning subgraph that is a tree. Every graph has a spanning forest. But only a connected graph has a spanning tree. A special kind of tree called a star is K1,k. An induced star with 3 edges is a claw. A caterpillar is a tree in which all non-leaf nodes form a single path. A k-ary tree is a rooted tree in which every internal vertex has k children. A 1-ary tree is just a path. A 2-ary tree is also called a binary tree. Cliques
K5, a complete graph.
If a subgraph looks like this, the vertices in that subgraph form a clique of size 5. The complete graph Kn of order n is a simple graph with n vertices in which every vertex is adjacent to every other. The example graph to the right is complete. The complete graph on n vertices is often denoted by Kn. It has n(n-1)/2 edges (corresponding to all possible choices of pairs of vertices). A clique in a graph is a set of pairwise adjacent vertices. Since any subgraph induced by a clique is a complete subgraph, the two terms and their notations are usually used interchangeably. A k-clique is a clique of order k. In the example graph above, vertices 1, 2 and 5 form a 3-clique, or a triangle. A maximal clique is a clique that is not a subset of any other clique (some authors reserve the term clique for maximal cliques). The clique number ω(G) of a graph G is the order of a largest clique in G. Strongly connected componentA related but weaker concept is that of a strongly connected component. Informally, a strongly connected component of a directed graph is a subgraph where all nodes in the subgraph are reachable by all other nodes in the subgraph. Reachability between nodes is established by the existence of a path between the nodes. A directed graph can be decomposed into strongly connected components by running the depth-first search (DFS) algorithm twice: first, on the graph itself and next on the transpose of the graph in decreasing order of the finishing times of the first DFS. Given a directed graph G, the transpose GT is the graph G with all the edge directions reversed. KnotsA knot in a directed graph is a collection of vertices and edges with the property that every vertex in the knot has outgoing edges, and all outgoing edges from vertices in the knot terminate at other vertices in the knot. Thus it is impossible to leave the knot while following the directions of the edges. MinorsA minor G2 = (V2,E2) of G1 = (V1,E1) is an injection from V2 to V1 such that every edge in E2 corresponds to a path (disjoint from all other such paths) in G1 such that every vertex in V1 is in one or more paths, or is part of the injection from V1 to V2. This can alternatively be phrased in terms of contractions, which are operations which collapse a path and all vertices on it into a single edge (see Minor (graph theory)). EmbeddingAn embedding G2 = (V2,E2) of G1 = (V1,E1) is an injection from V2 to V1 such that every edge in E2 corresponds to a path (disjoint from all other such paths) in G1. Adjacency and degreeIn graph theory, degree, especially that of a vertex, is usually a measure of immediate adjacency. An edge connects two vertices; these two vertices are said to be incident to that edge, or, equivalently, that edge incident to those two vertices. All degree-related concepts have to do with adjacency or incidence. The degree, or valency, dG(v) of a vertex v in a graph G is the number of edges incident to v, with loops being counted twice. A vertex of degree 0 is an isolated vertex. A vertex of degree 1 is a leaf. In the labelled simple graph example, vertices 1 and 3 have a degree of 2, vertices 2, 4 and 5 have a degree of 3, and vertex 6 has a degree of 1. If E is finite, then the total sum of vertex degrees is equal to twice the number of edges. The total degree of a graph is equal to two times the number of edges, loops included. This means that for a graph with 3 vertices with each vertex having a degree of two (i.e. a triangle) the total degree would be six (e.g. 3 x 2 = 6). The general formula for this is total degree = 2n where n = number of edges. A degree sequence is a list of degrees of a graph in non-increasing order (e.g. d1 ≥ d2 ≥ … ≥ dn). A sequence of non-increasing integers is realizable if it is a degree sequence of some graph. Two vertices u and v are called adjacent if an edge exists between them. We denote this by u ~ v or u ↓ v. In the above graph, vertices 1 and 2 are adjacent, but vertices 2 and 4 are not. The set of neighbors of v, that is, vertices adjacent to v not including v itself, forms an induced subgraph called the (open) neighborhood of v and denoted NG(v). When v is also included, it is called a closed neighborhood and denoted by NG[v]. When stated without any qualification, a neighborhood is assumed to be open. The subscript G is usually dropped when there is no danger of confusion; the same neighborhood notation may also be used to refer to sets of adjacent vertices rather than the corresponding induced subgraphs. In the example graph, vertex 1 has two neighbors: vertices 2 and 5. For a simple graph, the number of neighbors that a vertex has coincides with its degree. A dominating set of a graph is a vertex subset whose closed neighborhood includes all vertices of the graph. A vertex v dominates another vertex u if there is an edge from v to u. A vertex subset V dominates another vertex subset U if every vertex in U is adjacent to some vertex in V. The minimum size of a dominating set is the domination number γ(G). In computers, a finite, directed or undirected graph (with n vertices, say) is often represented by its adjacency matrix: an n-by-n matrix whose entry in row i and column j gives the number of edges from the i-th to the j-th vertex. Spectral graph theory studies relationships between the properties of the graph and its adjacency matrix. The maximum degree Δ(G) of a graph G is the largest degree over all vertices; the minimum degree δ(G), the smallest. A graph in which every vertex has the same degree is regular. It is k-regular if every vertex has degree k. A 0-regular graph is an independent set. A 1-regular graph is a matching. A 2-regular graph is a vertex disjoint union of cycles. A 3-regular graph is said to be cubic, or trivalent. A k-factor is a k-regular spanning subgraph. A 1-factor is a perfect matching. A partition of edges of a graph into k-factors is called a k-factorization. A k-factorable graph is a graph that admits a k-factorization. A graph is biregular if it has unequal maximum and minimum degrees and every vertex has one of those two degrees. A strongly regular graph is a regular graph such that any adjacent vertices have the same number of common neighbors as other adjacent pairs and that any nonadjacent vertices have the same number of common neighbors as other nonadjacent pairs. IndependenceIn graph theory, the word independent usually carries the connotation of pairwise disjoint or mutually nonadjacent. In this sense, independence is a form of immediate nonadjacency. An isolated vertex is a vertex not incident to any edges. An independent set, or coclique, or stable set or staset, is a set of vertices of which no pair is adjacent. Since the graph induced by any independent set is an empty graph, the two terms are usually used interchangeably. In the example above, vertices 1, 3, and 6 form an independent set; and 3, 5, and 6 form another one. Two subgraphs are edge disjoint if they have no edges in common. Similarly, two subgraphs are vertex disjoint if they have no vertices (and thus, also no edges) in common. Unless specified otherwise, a set of disjoint subgraphs are assumed to be pairwise vertex disjoint. The independence number α(G) of a graph G is the size of the largest independent set of G. A graph can be decomposed into independent sets in the sense that the entire vertex set of the graph can be partitioned into pairwise disjoint independent subsets. Such independent subsets are called partite sets, or simply parts. A graph that can be decomposed into two partite sets but not fewer is bipartite; three sets but not fewer, tripartite; k sets but not fewer, k-partite; and an unknown number of sets, multipartite. An 1-partite graph is the same as an independent set, or an empty graph. A 2-partite graph is the same as a bipartite graph. A graph that can be decomposed into k partite sets is also said to be k-colourable. A complete multipartite graph is a graph in which vertices are adjacent if and only if they belong to different partite sets. A complete bipartite graph is also referred to as a biclique; if its partite sets contain n and m vertices, respectively, then the graph is denoted Kn,m. A k-partite graph is semiregular if each of its partite sets has a uniform degree; equipartite if each partite set has the same size; and balanced k-partite if each partite set differs in size by at most 1 with any other. The matching number α'(G) of a graph G is the size of a largest matching, or pairwise vertex disjoint edges, of G. A spanning matching, also called a perfect matching is a matching that covers all vertices of a graph. ConnectivityConnectivity extends the concept of adjacency and is essentially a form (and measure) of concatenated adjacency. If it is possible to establish a path from any vertex to any other vertex of a graph, the graph is said to be connected; otherwise, the graph is disconnected. A graph is totally disconnected if there is no path connecting any pair of vertices. This is just another name to describe an empty graph or independent set. A cut vertex, or articulation point, is a vertex whose removal disconnects the remaining subgraph. A cut set, or vertex cut or separating set, is a set of vertices whose removal disconnects the remaining subgraph. A bridge is an analogous edge (see below). If it is always possible to establish a path from any vertex to every other even after removing any k - 1 vertices, then the graph is said to be k-vertex-connected or k-connected. Note that a graph is k-connected if and only if it contains k internally disjoint paths between any two vertices. The example graph above is connected (and therefore 1-connected), but not 2-connected. The vertex connectivity or connectivity κ(G) of a graph G is the minimum number of vertices that need to be removed to disconnect G. The complete graph Kn has connectivity n - 1 for n > 1; and a disconnected graph has connectivity 0. In network theory, a giant component is a connected subgraph that contains a majority of the entire graph's nodes. A bridge, or cut edge or isthmus, is an edge whose removal disconnects a graph. (For example, all the edges in a tree are bridges.) A disconnecting set is a set of edges whose removal increases the number of components. An edge cut is the set of all edges which have one vertex in some proper vertex subset S and the other vertex in V(G)\S. Edges of K3 form a disconnecting set but not an edge cut. Any two edges of K3 form a minimal disconnecting set as well as an edge cut. An edge cut is necessarily a disconnecting set; and a minimal disconnecting set of a nonempty graph is necessarily an edge cut. A bond is a minimal (but not necessarily minimum), nonempty set of edges whose removal disconnects a graph. A cut vertex is an analogous vertex (see above). A graph is k-edge-connected if any subgraph formed by removing
any k - 1 edges is still connected. The edge connectivity
κ'(G) of a graph G is the minimum
number of edges needed to disconnect G. One well-known result is
that A component is a maximally connected subgraph. A block is either a maximally 2-connected subgraph, a bridge (together with its vertices), or an isolated vertex. A biconnected component is a 2-connected component. An articulation point (also known as a separating vertex) of a graph is a vertex whose removal from the graph increases its number of connected components. A biconnected component can be defined as a subgraph induced by a maximal set of nodes that has no separating vertex. DistanceThe distance dG(u, v) between two (not necessary distinct) vertices u and v in a graph G is the length of a shortest path between them. The subscript G is usually dropped when there is no danger of confusion. When u and v are identical, their distance is 0. When u and v are unreachable from each other, their distance is defined to be infinity ∞. The eccentricity εG(v) of a vertex v in a graph G is the maximum distance from v to any other vertex. The diameter diam(G) of a graph G is the maximum eccentricity over all vertices in a graph; and the radius rad(G), the minimum. When there are two components in G, diam(G) and rad(G) defined to be infinity ∞. Trivially, diam(G) ≤ 2 rad(G). Vertices with maximum eccentricity are called peripheral vertices. Vertices of minimum eccentricity form the center. A tree has at most two center vertices. The Wiener index of a vertex v in a graph G, denoted by WG(v) is the sum of distances between v and all others. The Wiener index of a graph G, denoted by W(G), is the sum of distances over all pairs of vertices. An undirected graph's Wiener polynomial is defined to be Σ qd(u,v) over all unordered pairs of vertices u and v. Wiener index and Wiener polynomial are of particular interest to mathematical chemists. The k-th power Gk of a graph G is a supergraph formed by adding an edge between all pairs of vertices of G with distance at most k. A second power of a graph is also called a square. A k-spanner is a spanning subgraph, S, in which every two vertices are at most k times as far apart on S than on G. The number k is the dilation. k-spanner is used for studying geometric network optimization. GenusA crossing is a pair of intersecting edges. A graph is embeddable on a surface if its vertices and edges can be arranged on it without any crossing. The genus of a graph is the lowest genus of any surface on which the graph can embed. A planar graph is one which can be drawn on the (Euclidean) plane without any crossing; and a plane graph, one which is drawn in such fashion. In other words, a planar graph is a graph of genus 0. The example graph is planar; the complete graph on n vertices, for n> 4, is not planar. Also, a tree is necessarily a planar graph. When a graph is drawn without any crossing, any cycle that surrounds a region without any edges reaching from the cycle into the region forms a face. Two faces on a plane graph are adjacent if they share a common edge. A dual, or planar dual when the context needs to be clarified, G* of a plane graph G is a graph whose vertices represent the faces, including any outerface, of G and are adjacent in G* if and only if their corresponding faces are adjacent in G. The dual of a planar graph is always a planar pseudograph (e.g. consider the dual of a triangle). In the familiar case of a 3-connected simple planar graph G (isomorphic to a convex polyhedron P), the dual G* is also a 3-connected simple planar graph (and isomorphic to the dual polyhedron P*). Furthermore, since we can establish a sense of "inside" and "outside" on a plane, we can identify an "outermost" region that contains the entire graph if the graph does not cover the entire plane. Such outermost region is called an outer face. An outerplanar graph is one which can be drawn in the planar fashion such that its vertices are all adjacent to the outer face; and an outerplane graph, one which is drawn in such fashion. The minimum number of crossings that must appear when a graph is drawn on a plane is called the crossing number. The minimum number of planar graphs needed to cover a graph is the thickness of the graph. Weighted graphs and networksA weighted graph associates a label (weight) with every edge in the graph. Weights are usually real numbers. They may be restricted to rational numbers or integers. Certain algorithms require further restrictions on weights; for instance, Dijkstra's algorithm works properly only for positive weights. The weight of a path or the weight of a tree in a weighted graph is the sum of the weights of the selected edges. Sometimes a non-edge is labeled by a special weight representing infinity. Sometimes the word cost is used instead of weight. When stated without any qualification, a graph is always assumed to be unweighted. In some writing on graph theory the term network is a synonym for a weighted graph. A network may be directed or undirected, it may contain special vertices (nodes), such as source or sink. The classical network problems include:
DirectionA directed arc, or directed edge, is an ordered pair of endvertices that can be represented graphically as an arrow drawn between the endvertices. In such an ordered pair the first vertex is called the initial vertex or tail; the second one is called the terminal vertex or head (because it appears at the arrow head). An undirected edge disregards any sense of direction and treats both endvertices interchangeably. A loop in a digraph, however, keeps a sense of direction and treats both head and tail identically. A set of arcs are multiple, or parallel, if they share the same head and the same tail. A pair of arcs are anti-parallel if one's head/tail is the other's tail/head. A digraph, or directed graph, or oriented graph, is analogous to an undirected graph except that it contains only arcs. A mixed graph may contain both directed and undirected edges; it generalizes both directed and undirected graphs. When stated without any qualification, a graph is almost always assumed to be undirected. A digraph is called simple if it has no loops and at most one arc between any pair of vertices. When stated without any qualification, a digraph is usually assumed to be simple. In a digraph Γ, we distinguish the out degree dΓ+(v), the number of edges leaving a vertex v, and the in degree dΓ-(v), the number of edges entering a vertex v. If the graph is oriented, the degree dΓ(v) of a vertex v is equal to the sum of its out- and in- degrees. When the context is clear, the subscript Γ can be dropped. Maximum and minimum out degrees are denoted by Δ+(Γ) and δ+(Γ); and maximum and minimum in degrees, Δ-(Γ) and δ-(Γ). An out-neighborhood, or successor set, N+Γ(v) of a vertex v is the set of tails of arcs going from v. Likewise, an in-neighborhood, or predecessor set, N-Γ(v) of a vertex v is the set of heads of arcs going into v. A source is a vertex with 0 in-degree; and a sink, 0 out-degree. A vertex v dominates another vertex u if there is an arc from v to u. A vertex subset S is out-dominating if every vertex not in S is dominated by some vertex in S; and in-dominating if every vertex in S is dominated by some vertex not in S. A kernel is an independent out-dominating set. A digraph is kernel perfect if every induced sub-digraph has a kernel. An Eulerian digraph is a digraph with equal in- and out-degrees at every vertex. The zweieck of an undirected edge e = (u,v) is the pair of diedges (u,v) and (v,u) which form the simple dicircuit. An orientation is an assignment of directions to the edges of an undirected or partially directed graph. When stated without any qualification, it is usually assumed that all undirected edges are replaced by a directed one in an orientation. Also, the underlying graph is usually assumed to be undirected and simple. A tournament is a digraph in which each pair of vertices is connected by exactly one arc. In other words, it is an oriented complete graph. A directed path, or just a path when the context is clear, is an oriented simple path such that all arcs go the same direction, meaning all internal vertices have in- and out-degrees 1. A vertex v is reachable from another vertex u if there is a directed path that starts from u and ends at v. Note that in general the condition that u is reachable from v does not imply that v is also reachable from u. If v is reachable from u, then u is a predecessor of v and v is a successor of u. If there is an arc from u to v, then u is a direct predecessor of v, and v is a direct successor of u. A digraph is strongly connected if every vertex is reachable from every other following the directions of the arcs. On the contrary, a digraph is weakly connected if its underlying undirected graph is connected. A weakly connected graph can be thought of as a digraph in which every vertex is "reachable" from every other but not necessarily following the directions of the arcs. A strong orientation is an orientation that produces a strongly connected digraph. A directed cycle, or just a cycle when the context is clear, is an oriented simple cycle such that all arcs go the same direction, meaning all vertices have in- and out-degrees 1. A digraph is acyclic if it does not contain any directed cycle. A finite, acyclic digraph with no isolated vertices necessarily contains at least one source and at least one sink. An arborescence, or out-tree or branching, is an oriented tree in which all vertices are reachable from a single vertex. Likewise, an in-tree is an oriented tree in which a single vertex is reachable from every other one. Directed acyclic graphsThe partial order structure of directed acyclic graphs (or DAGs) gives them their own terminology. If there is a directed edge from u to v, then we say u is a parent of v and v is a child of u. If there is a directed path from u to v, we say u is an ancestor of v and v is a descendant of u. The moral graph of a DAG is the undirected graph created by adding an (undirected) edge between all parents of the same node (sometimes called marrying), and then replacing all directed edges by undirected edges. A DAG is perfect if, for each node, the set of parents is complete (i.e. no new edges need to be added when forming the moral graph). ColouringVertices in graphs can be given colours to identify or label them. Although they may actually be rendered in diagrams in different colours, working mathematicians generally pencil in numbers or letters (usually numbers) to represent the colours. Given a graph G (V,E) a k-colouring of G is a map ϕ : V → {1, ... , k} with the property that (u, v) ∈ E ⇒ ϕ(u) ≠ ϕ(v) - in other words, every vertex is assigned a colour with the condition that adjacent vertices cannot be assigned the same colour. The chromatic number χ(G) is the smallest k for which G has a k-colouring. Given a graph and a colouring, the colour classes of the graph are the sets of vertices given the same colour. VariousA graph invariant is a property of a graph G, usually a number or a polynomial, that depends only on the isomorphism class of G. Examples are the order, genus, chromatic number, and chromatic polynomial of a graph. References
Published - May 2011 Find free glossaries at TranslationDirectory.com Find free dictionaries at TranslationDirectory.com Subscribe to free TranslationDirectory.com newsletter Need more translation jobs from translation agencies? Click here! Translation agencies are welcome to register here - Free! Freelance translators are welcome to register here - Free! Submit your glossary or dictionary for publishing at TranslationDirectory.com |
|
|
Legal Disclaimer Site Map |